Your shopping cart
😊 Product added to cart successfully
Product removed to cart successfully
Couldn't load pickup availability
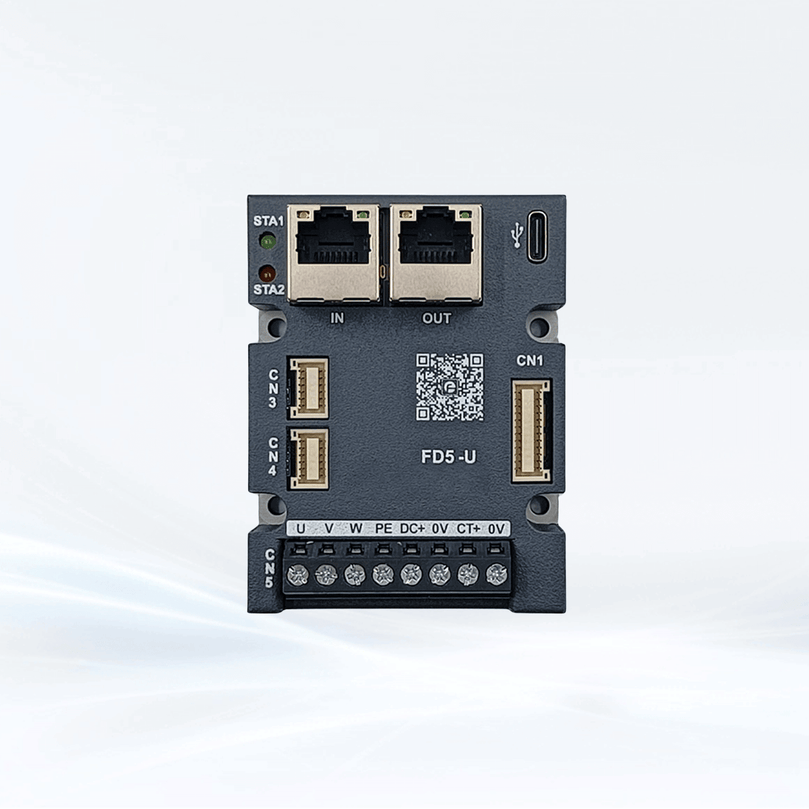
| FEATURES | FD5-U1-N6406 |
| Main Loop Power Input | 12-64VDC(When only the main circuit is input,the drive can work normally,but it cannot be powered off the main circuit alone.And keep the drive in a communicable state) |
| Control Loop Power Input | 12-64VDC (When only the control power is inputthe drive can be powered on self-test, communication,etc.,but cannot be enabled) |
| Rated Current(A) | 6 |
| Maximun Current (A) | 16.9 |
| Motor Type | Suitable for low voltage DDR/DDL/ rotary motor/voice coil motor |
| Magnetic Pole Identification Method | Hall identification,pre-position identification,micromotion identification |
| Automatic Configuration | Support communication encoder power-on automatically read,configure motor parameters;Support independent encoder and third-party encoder switching;Supports phase sequence identification |
| Optional Mode | Torque mode,speed mode,position mode,(open/dlosed loop)force control mode |
| Torque Control Bandwidth | 4.5K |
| Command Source | Analog,EtherCAT,internal command |
| Current Control Accuracy | ±0.5%Rated output current |
| Speed Control Bandwidth | 3K |
| Internal Speed Control Refresh Cycle |
16K |
| Control Method | Pladjustment,torque feedforward,friction compensation,loop fltering,etc |
| Command Source | Analog,Ethercat,intemal multiple speed |
| The Internal Position Controls the Refresh Cycle |
4K |
| Control Method | Proportional adjustment,speed feedforward,command smoothing,etc |
| Command Source | Pulse,EtherCAT,internal multisegment position |
| High Precision Al | 1 channel,±10VDC differential,resolution 16bit;Can be used for closed loop force control |
| Standard DI | 3-channel fast DI,directly connected to FPGA,photoelectric isolation, support NPN/PNP mode |
| High Speed DI | 2 ultra-high speed DI,directly connected to FGPA,photoelectric isolation,support NPN/PNP mode |
| Standard DO | 4-channel fast DO,directly connected to FPGA,photoelectric isolation, NPN,maximum load 50mA |
| Pulse & Direction | / |
| EtherCAT Communication | N type machine support EtherCAT communication control, minimum communication cycle 250us |
| Background Debugging Communication Port | 1 USB Type C port,used for software debugging of the drive |
| RS485 Communication Port | / |
| Communication Type Coding Port | RS485,support Tamagawa protocol,BISS C rotocol;Maximum baud rate 4M |
| Dart Line Differential Encoder Port | ABZ,Maximum input frequency 5MHz;Can be used as a second encoder input for full closed loop applications;R series without the second interface |
| Hall Port | Single-ended NPN mode |
| Motor Temperature Sensor Interface | Supported,thermistor PTC/NTC;R series without the PTC/NTC |
| STA1_LED | Indicates the operating status of the drive |
| STA2_LED | Indicates drive failure status |
| Protection Function | Input voltage undervoltage and overvoltage,driver overcurrent,overload,input short circuit to the ground protection,motor overload,high temperature protection,overrange,The position deviation is too arge,the second encoder is missing,the car protection,the main circuit self-diagnosis of power-on,etc |
| Ambient Temperature | Operating temperature:0-55C:Storage temperature:-20-85℃ |
| Ambient Humidity | Ambient humidity:10-90% |
| Shock Resistance | Shock:1.0g |
| Environment Altitude | Altitude:<2000m |
| Pollution Level | PD2 |
| Prohibited Working Environments | Working environment with corrosive or combustible gases,chemicals or oily water,iron and salt containing dust |
| Protection Leve | IP20 |
| Cooling Mode | Natural Cooling |
| Installation Dimensions | 57.5mm×75.5mm×36.7mm |




